Il y a quelques mois, j’avais fait un montage avec des lego pour faire des mesures de temps et vitesses. j’avais 3 points de mesures. Une mesure puis un mettre plus loin une autre mesure et quelques cm plus loin une troisième. Ca permettait de mesure le temps pour faire 1m départ arrêté et avoir la vitesse à 1m.
Je m’en servais aussi pour mesurer la vitesse max de la voiture en passant à fond.
Le montage était un peu archaïque, pas facile à régler à chaque montage et seulement 3 capteurs le long de la piste. Du coup j’ai réfléchi à améliorer le système!!!
J’ai commandé y’a un moment déjà de quoi le faire mais j’avais pas le temps, en ce moment, j’ai un peu plus de temps et je me suis plongé dans les composants et le code.
Premier tests encourageant.

Pour ce test, j’ai choisis la facilité, j’ai rapidement monté le circuit First du fiston.
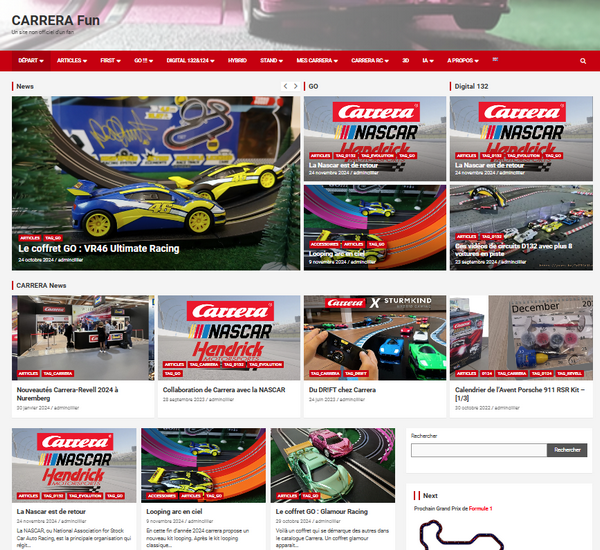
J’ai un Raspberry Pi connecté à une platine pour distribuer les connections.
Branché dessus, j’ai un relais, un feu tricolore 3 diodes, un capteur température, hydrométrie, pression atmosphérique et 2 platines de 4 capteurs infrarouge.
J’ai donc 8 points de détections de véhicule.
J’ai 4 points sur chaque bande blanche (des goulottes électrique) que l’on voit en haut de la piste tenues par les livres.
distance des mesures : 10cm , 20cm, 10cm et 20cm plus loin sur la seconde bande 10cm , 20cm, 10cm. Distance entre le 1er capteur et le dernier : 1mètre
Zoom sur le mini PC et la platine :
On voit le relais (bleu) en haut qui permettra de connecter une manette pour prendre le contrôle de la voiture. Et en bas le capteur T°, Hygrometrie et pression (météo)
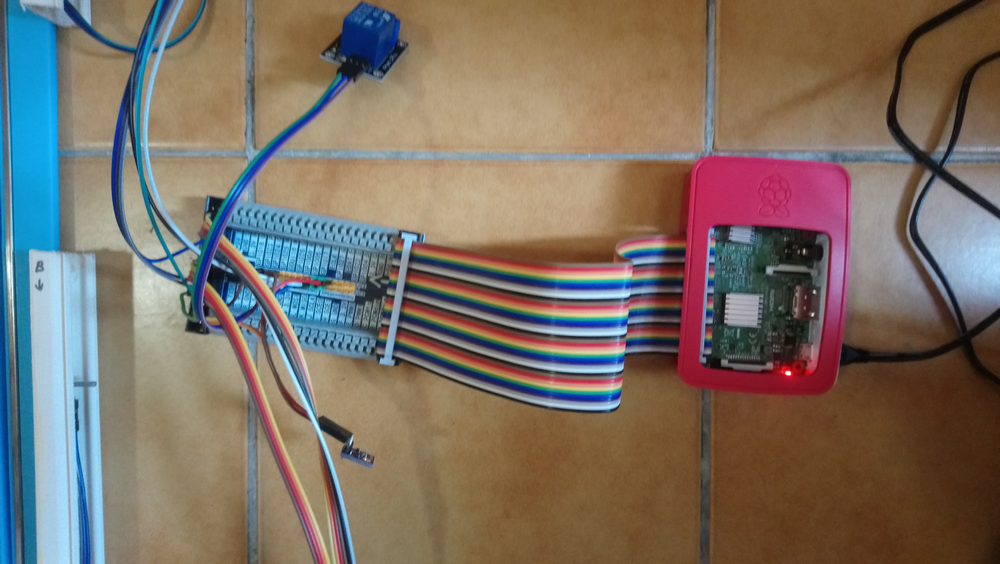
Une autre vue :
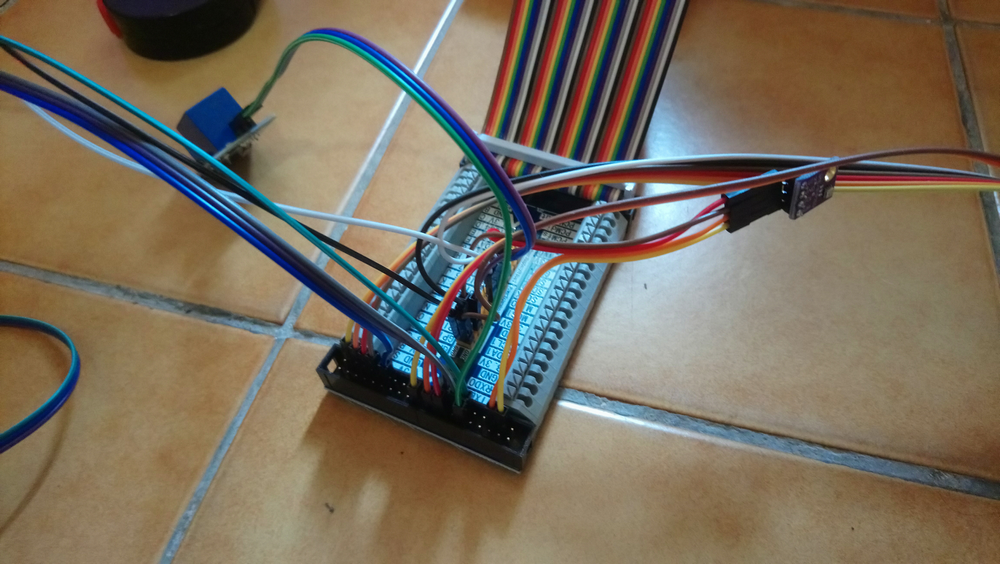
La platine qui gère les 4 capteurs de présence de voiture :
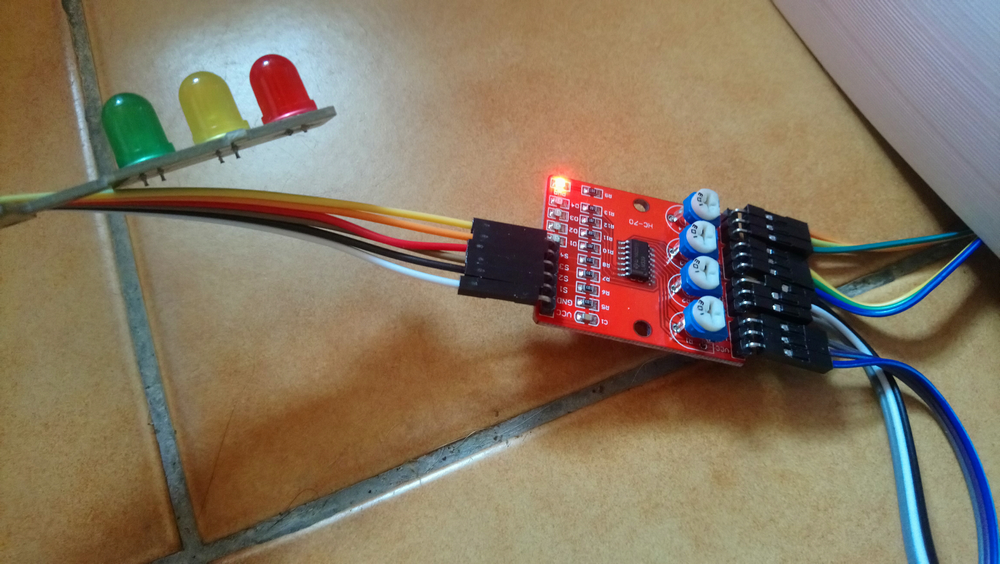
On aperçoit en haut le feu tricolore
Les diodes émettrice et réceptrice à gauche des visses:
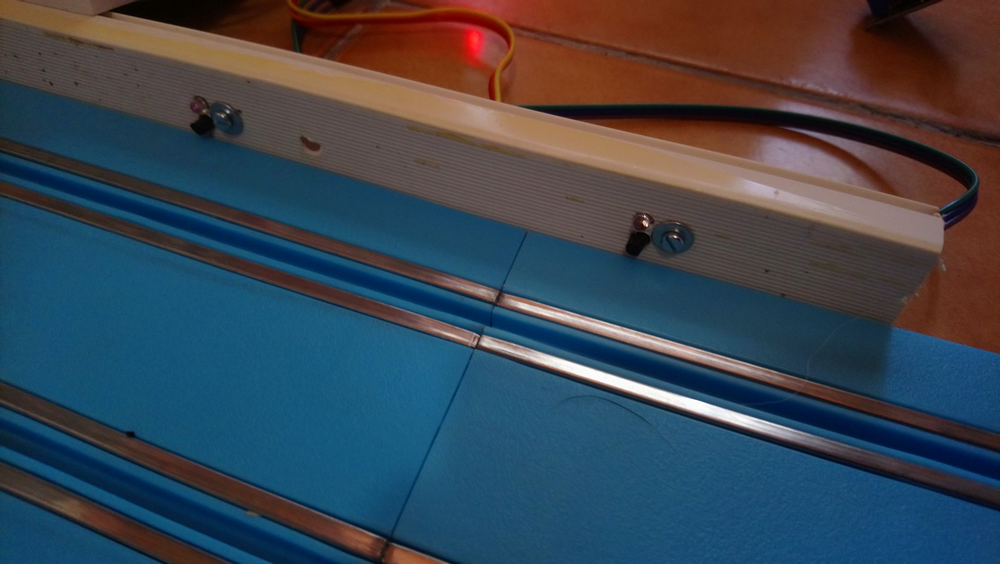
C’est fixé sur une goulotte électrique
Vue de derrière :

Budget matériel électronique :
Hors Raspberry : environ 10€
J’ai testé les 4 voitures First.
J’ai récupéré le fichier texte généré par le programme, un petit coup dans excel et voila :
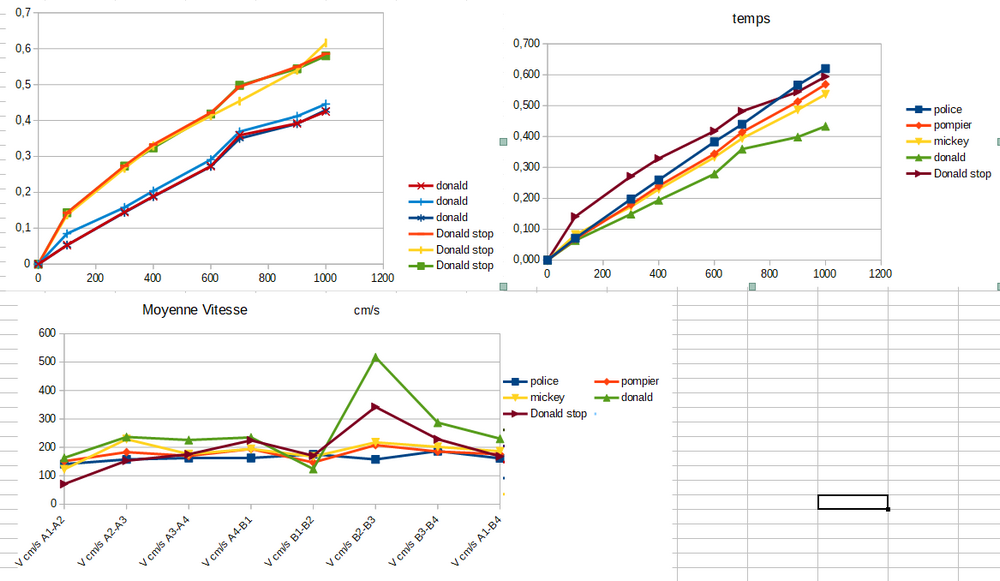
J’ai testé la voiture Donald en 2 configurations, comme les autres, départ lancé passage a fond et une fois départ arrêté à ras du 1er capteur. Chaque test a 3 essais pour avoir une moyenne et écarter d’éventuels relevés parasites
La courbe en haut a gauche, est celle de Donald, c’est assez régulier comme relevés.
Je dois avoir un problème sur le relevé en zone B2-B3, car j’ai un décalage sur chaque courbe dans cette zone. Le capteur ne doit pas détecter la voiture au même niveau ce qui explique une différence sur certaines voitures uniquement.
A découvrir prochainement le test sur circuit GO.